
Concept and Inspiration
This project was developed as a team-based engineering challenge to design and build a robot capable of omnidirectional movement. Inspired by real-world applications such as autonomous delivery and interactive museum guides, the robot was envisioned to move smoothly in any direction and use computer vision to interact with its environment.
Objective
To lead a cross-functional team in creating a responsive, multi-directional robot capable of detecting and identifying objects in real time, with the long-term goal of supporting guided tours and interactive navigation in public spaces.
Key Features
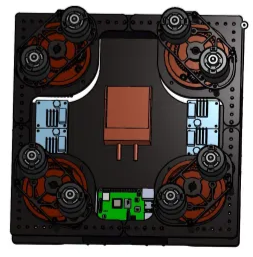
- Custom-built chassis with four omni wheels for full 360-degree movement
- Raspberry Pi-powered vision system with YOLO and AprilTag integration
- Object detection and gesture recognition for interactive feedback
- Modular electronics including motor controllers and voltage-safe power routing
- Dual-mode control: autonomous tracking and manual override via Xbox controller
